Kamerasystem zur Unterstützung bei der Suche nach Seenotfällen
Aktuelle Lage
Während Rettungseinsätzen von NGOs gestaltet sich die Suche nach Menschen in Seenot in der Regel äußerst aufwendig. So ist das manuelle Absuchen des Horizonts nach Seenotfällen mit Ferngläsern fehleranfällig, anstrengend und bindet Personal, das anderweitig gebraucht wird. Staatliche Akteure und Organisationen hingegen können sich spezielle Kamerasysteme leisten, um eine tageszeitunabhängige und lückenlose Überwachung der Schiffsumgebung sicherzustellen. Dabei sieht der Anwender nicht nur ein stabilisiertes Videobild, sondern kann auch auf Funktionen wie das automatische Suchen und Verfolgen von Schwimmkörpern zurückgreifen. Die Kosten für die erforderliche Technik inklusive der Wartung bewegen sich allerdings im hohen vier- bis fünfstelligen Bereich – ein Hindernis für zivile Hilfsorganisationen, welche sich durch Spenden finanzieren. Zudem haben zivile Akteure häufig keinen oder nur erschwerten Zugang zu solchen Kamerasystemen. Die bisherigen einfachen und kostengünstigeren Kameralösungen konnten weder die gewünschten Ergebnisse erzielen noch den anspruchsvollen Bedingungen auf See gerecht werden.
Ziel
Das SAR-CAM Projekt soll dazu beitragen, die Suche nach Menschen in Seenot effizienter zu gestalten und die Schiffsbesatzung zu entlasten. Zur Unterstützung der zivilen Seenotrettung wird hierfür ein kostengünstiges und individuell anpassbares Kamerasystem entwickelt. Dieses System soll leicht zu bedienen sein und die operierende Besatzung entlasten, indem sie Schwimmkörper in der Ferne identifizieren können, ohne dabei permanent im Freien zu stehen und den Horizont per Fernglas absuchen zu müssen. Das Kamerasystem, welches beispielsweise am Mast befestigt wird, scannt die Schiffsumgebung automatisch und erleichtert das Erkennen und Verfolgen von Schlauch-/ Holzbooten oder Ähnlichem. Das System kann an die unterschiedlichen Bedürfnisse verschiedener Organisationen angepasst und auf die jeweiligen Szenarien der SAR-Einsätze zugeschnitten werden. Nach der Installation ist das System robust genug für alle Seebedingungen, aber auch weiterhin für technische Neuerungen und Updates zugänglich. Durch ehrenamtliche und gemeinnützige Arbeit im Team werden die Entwicklungskosten im Vergleich zu konventionellen Anbietern erheblich gesenkt. Es fallen lediglich Kosten bei der Anschaffung und Zusammenstellung der Hardware sowie bei der individuellen Montage und (wenn nötig) bei der Wartung an.
Über uns
SAR-CAM beschäftigt sich seit dreieinhalb Jahren mit günstigen Kameralösungen für den Einsatz auf Schiffen ziviler Seenotrettungsorganisationen im Mittelmeer. Die Projektleiter engagieren sich schon lange ehrenamtlich in verschiedenen Einsatzgebieten der Seenotrettung. Die ersten zweckmäßigen Systeme wurden erfolgreich zusammengestellt und stetig erweitert. Erfreulicherweise ist das Core-Team seit dem 36C3 (36er Chaos Communication Congress vom Chaos Computerclub) auf fünf Mitglieder gewachsen. Seit Januar 2020 setzt sich die Arbeitsgruppe aus Mechatronik- und Informatik-Ingenieuren sowie einem Schiffsbaumeister und einem IT-Berater zusammen. Somit werden alle notwendigen Themenbereiche abgedeckt. Über neue Mitglieder und die Zusammenarbeit mit anderen Teams freuen wir uns immer sehr.
SAR-CAM ist ein im Aufbau befindliches gemeinnütziges Projekt. Die Hardware-Entwicklung ist dabei sehr zeit- und kostenintensiv. Sponsoring und Mithilfe sind daher herzlich willkommen!
Das Kamerasystem
Individualität
Speziell für die Seenotrettung und individuell auf das Einsatzschiff angepasst.
Entlastung
Automatisierte Erkennung von Schwimmkörpern sowie eine leichte Bedienbarkeit durch die Schiffscrew.
Kosten
Ehrenamtlich unterstützte Entwicklung für eine kostengünstiger Realisierung des Systems.
Die Priorität liegt auf der Entwicklung einer kostengünstigen und schnell einsetzbaren Lösung – eine professionelle und zuverlässige Anwendung mit Rücksicht auf Personensicherheit durch Anbringung am Mast.
Das System soll SAR-Einsätze wie folgt unterstützen:
- Identifizierung von Booten und Schiffen in großer Entfernung mittels automatischer Erkennungssoftware
- Abschätzung kritischer Situationen in großer Entfernung durch Nahaufnahmen in alle Richtungen (360° Kamera-Drehung)
- Bereitstellung eines User-Interface für die Visualisierung der Aufnahmen und Steuerung des Systems für die Brücken- bzw. Operator-Crew
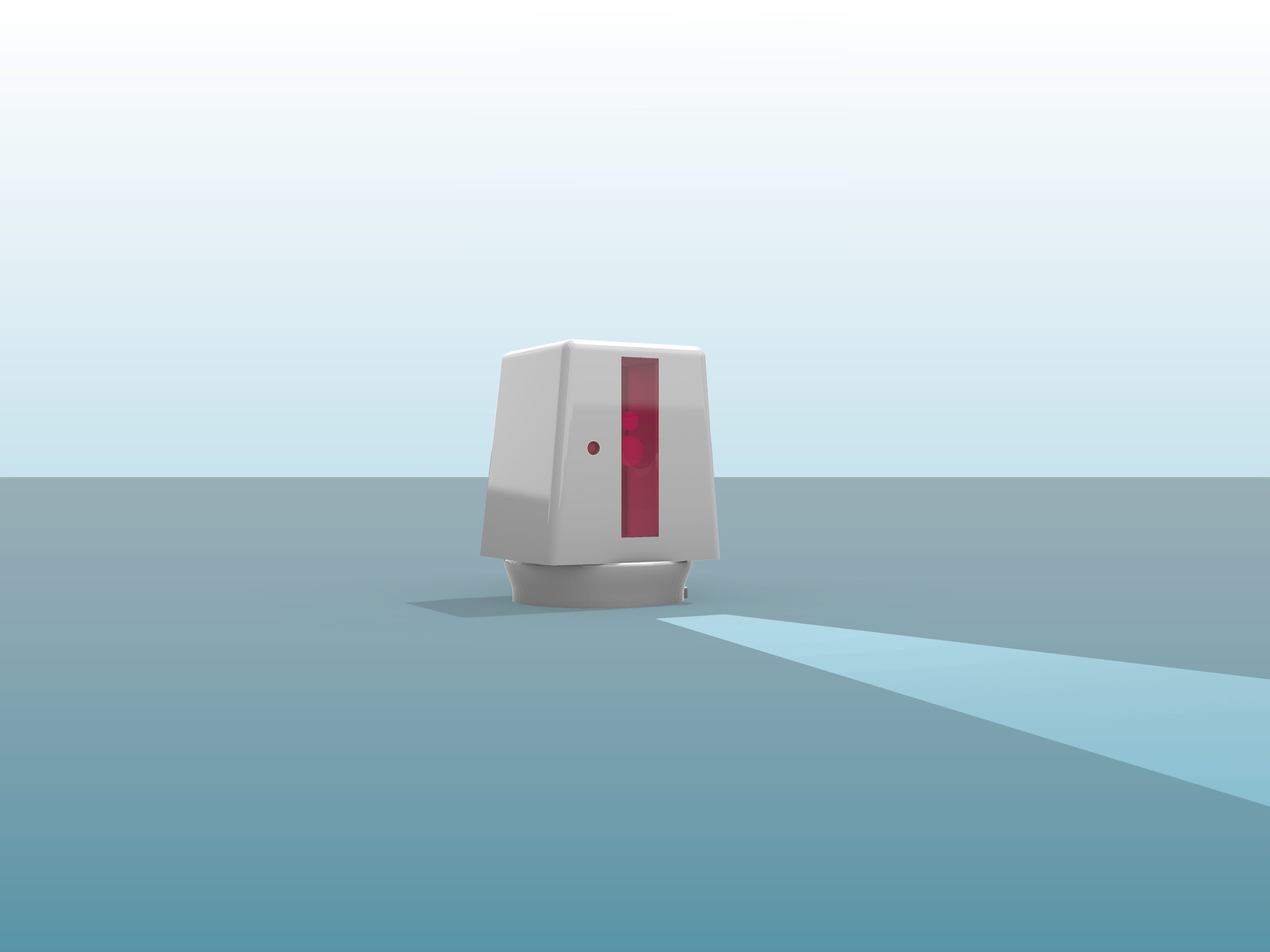
An unserem Prototypen werden alle Hardware spezifischen Funktionen des Gesamtsystems, inkusive eines nachgeführen Gehäuses getestet.
Details zur Umsetzung
Sensorik
- Verwendung einer handelsüblichen Video-Kamera mit hohem optischen Zoomfaktor (mittels geringer Sensorgröße und hoher Brennweite) für die Anwendung bei Tageslicht
- Im Verlauf des Projektes erweiterbar mit Wärmebildkamera für die Anwendung bei Nacht – ebenfalls mit hoher Brennweite
Mechanische Stabilisierung
- Das Sensorsystem benötigt wegen des hohen Zoomfaktors eine mechanische Stabilisierung, um das Gieren, Stampfen und Rollen des Schiffs auszugleichen und dadurch den Horizont im Blickfeld zu behalten
- Eine schnelle Umsetzung wird mittels eines hochwertigen, handelsüblichen Kamera-Gimbal-Systems ermöglicht
Mechatronik
- Bildübertragung via verlustfreiem SDI-Übertragungssystem
- Steuerungsdaten via Ethernet
- Erweiterung der Steuerungsmodi des Gimbals für unsere spezifische Anwendung
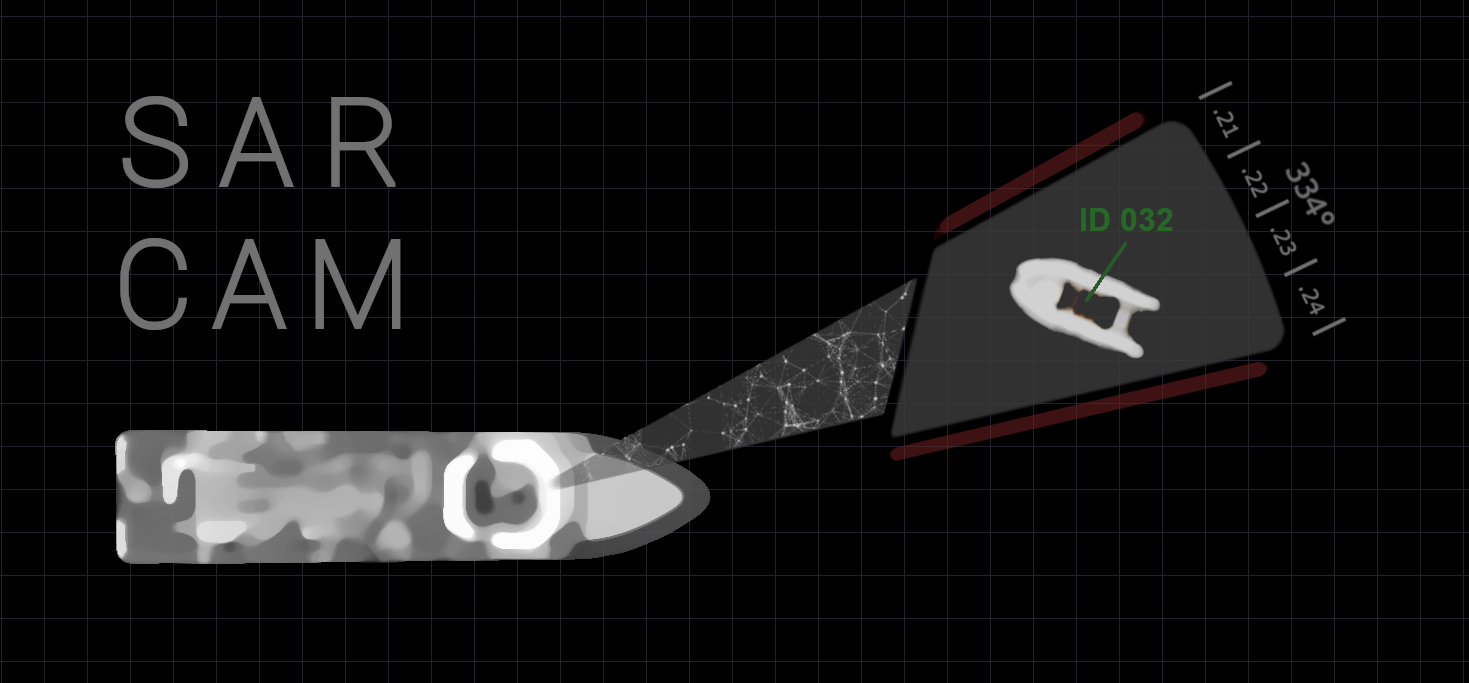
Bildverarbeitung und Objekterkennung
-
Bildvorverarbeitung
- Horizonterkennung: Wichtiger Vorverarbeitungsschritt für alle nachfolgenden Algorithmen
- Digitale Bild-Stabilisierung: Zusätzliche Stabilisierung des Bildes mithilfe des Horizonts, um mechanische Schwingungen weiter auszugleichen
-
Objekterkennung
- Anomalie-Detektor: Erkennung verdächtiger Bereiche entlang des Horizonts
- Anomalie-Tracker: Zusammenfassung detektierter Anomalien über mehrere Kamerabilder hinweg, um Objekte über einen längeren Zeitraum zu verfolgen
User-Interface
-
Visualisierungen
Die Visualisierung erfolgt ebenso wie die Bildverarbeitung auf dem zugehörigen Laptop-
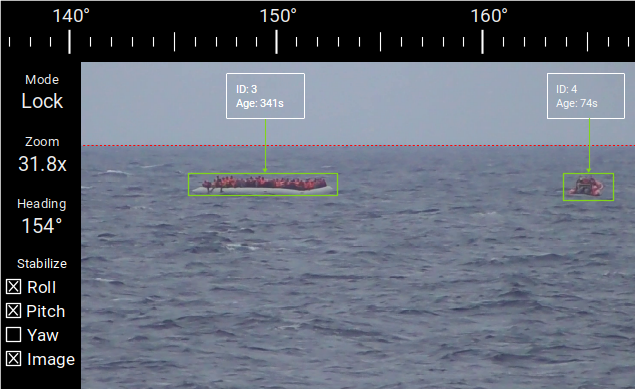
Live-Ansicht:
- Es werden alle verfügbaren Informationen dargestellt, um ein aktuelles Lagebild zu erstellen
- Bildverarbeitungsergebnisse (Detektionen, Horizont, ...)
- Einstellung des Kamerasystems (Ausrichtung, Zoomfaktor, ...)
- Umschalten/ Überlappen zwischen den einzelnen Sensoren (Kamera/ Wärmebild)
- Pausieren/ Zeitraffer, der je nach Zugriff auf Schiffs-BUS die Position des Schiffs (Geschwindigkeit, Ausrichtung, Kurs) mit der Detektion in Verbindung bringen kann
- Zustandsdaten des Kamerasystems (Temperatur, Luftfeuchtigkeit, ...)
-
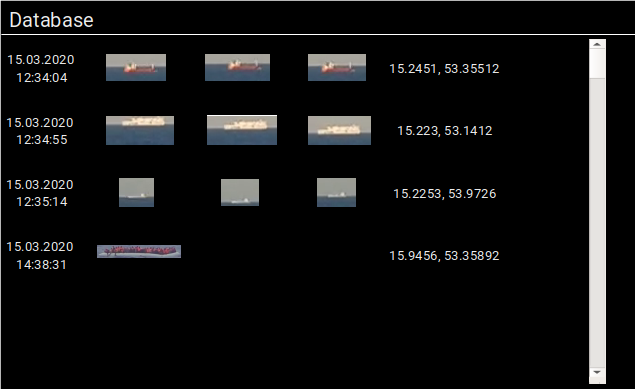
Datenbankansicht:
Diese Ansicht dient dazu das gewonnene Videomaterial und erkannte Objekte im Nachhinein darzustellen- Bilddatenansicht (Videoausschnitte / Einzelbilder der erkannten Objekte)
- Kartenansicht (Detektionsorte, Überwachungsbereich der Kamera, Schiffsroute)
-
Live-Ansicht:
-
Steuerung
- Manuelle Kamerasteuerung mit professionellem Joystick oder anderen günstigeren Controllern möglich
Gehäuse und Schiffsintegration
- Leicht demontierbares Gehäuse für schnelle Erreichbarkeit der elektronischen Komponenten
- Mitdrehendes Gehäuse mit Sichtfenster
- Gehäuseträger
- Abdichtung der einzelnen Bauteile
- Mechanische Schwingdämpfung
- Leitungsverlegung und Anschluss an die Schiffselektrik
- Befestigung aller Komponenten